An Open Dataset of Hezbollah FPV Drone Strikes on the IDF in Lebanon
The cheapest, fastest-evolving threat on Israel's northern border right now is a $500 quadcopter with a warhead zip-tied to it. Hezbollah has been flying FPV (first-person-view) drones across the frontier and posting the strike videos as propaganda — and every one of those clips is also, whether they like it or not, a piece of intelligence. The camera is the weapon's eye. If you watch enough of them, patterns fall out: what gets targeted, from what direction, with what approach profile.
So I started collecting them from OSINT sources. All of them. The result is an open, constantly-updated dataset of Hezbollah FPV drone-strike videos: github.com/itamarwe/fpv-drone-strikes-lebanon-dataset. It's public on purpose. I want anyone who is trying to understand how the enemy operates — or to build the sensors and algorithms that stop these drones — to be able to start from real data instead of a press release. This post is what's in it, and a demo of the kind of thing you can pull out of a single clip: a real 3-D flight path, reconstructed straight from the footage.
What's in the dataset
At the time of writing it's 95 strike videos spanning 2026-04-29 to 2026-06-13, and it grows as new footage surfaces. The repo itself is deliberately lightweight — a catalog with stable links — while the MP4s and thumbnails live in S3. Each entry is just enough to be useful:
- a date,
- a first-frame thumbnail,
- a short description of the target and location (e.g. "Merkava tank, Beaufort Castle", "Excavator, Majdal Zoun"), and
- a download link to the raw clip.
A couple of representative entries: Sholef howitzer, Adaissah (2026-06-06) and D9 armored bulldozer, Tayr Harfa (2026-06-12) — the full table with thumbnails and download links is in the repo README.
What the enemy is actually striking
Once you tabulate the target labels, the mix is its own piece of intelligence. This is real counts from the dataset manifest, not an estimate:
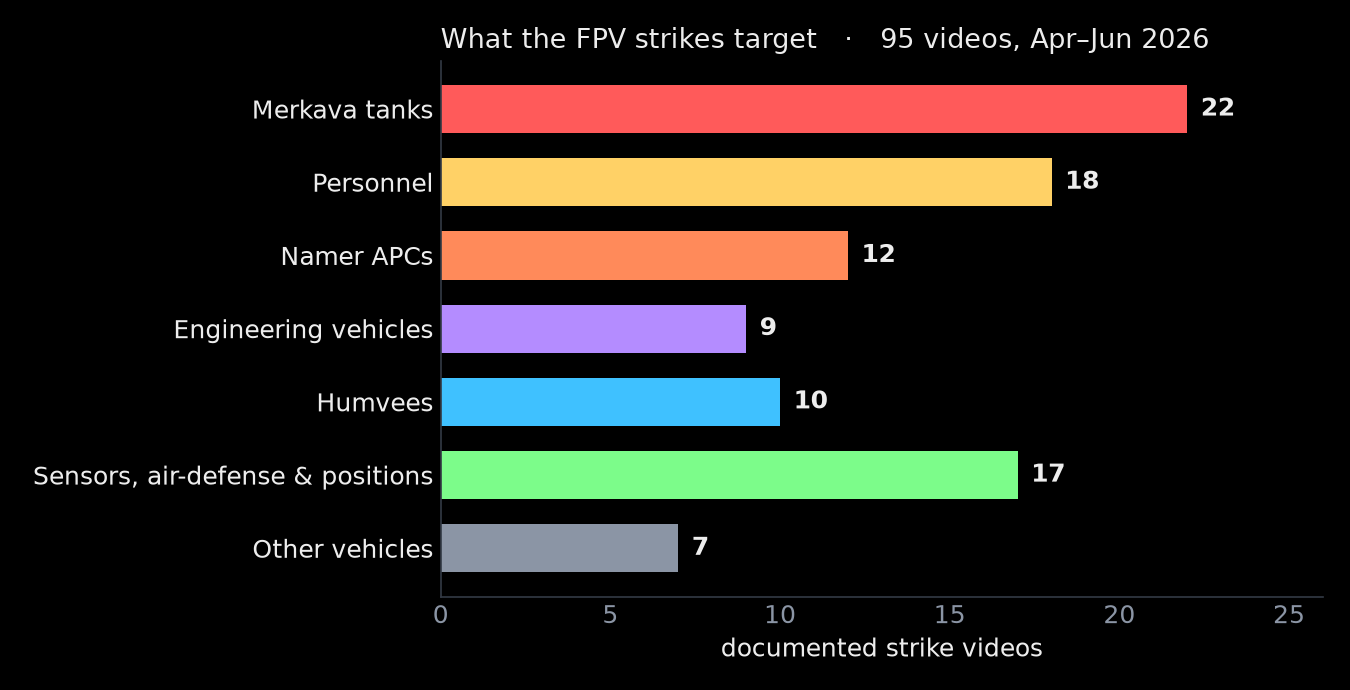
Armor dominates — Merkava tanks are the single most-targeted category — followed by personnel and Namer APCs. But the long tail is the interesting part: engineering vehicles (D9 bulldozers, excavators) clearing terrain, and a cluster of sensors, air-defense and counter-UAS platforms — surveillance cameras, radar, Iron Dome launchers, even "anti-drone platforms." The enemy is deliberately going after the things that would see or stop the next drone. That alone tells you where defensive effort is worth spending.
And it keeps coming. Plotting the videos by date, the log just climbs:
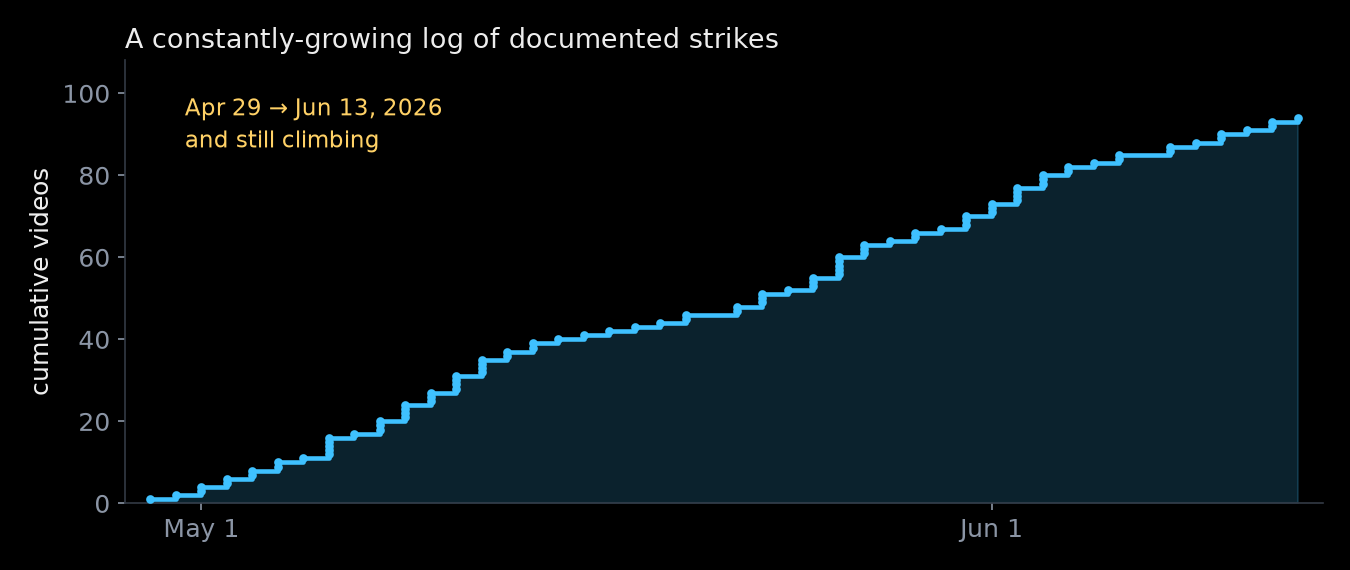
That's the case for keeping this open and current: a snapshot ages instantly; a living dataset lets a detection model — or a person — keep learning as the tactics shift.
Example — extracting FPV attack paths
To show the kind of analysis this dataset can serve, here's one example end to end. A strike video is a monocular camera moving through a real scene — exactly the input that modern feed-forward 3-D reconstruction is built for. So I took one clip — the 2026-06-06 Sholef-howitzer strike near Adaissah — and asked: can I recover the drone's actual 3-D attack path, with no telemetry, just from the pixels?
The pipeline is short, and I kept all of it in the repo alongside the figure code for this post:

The one non-obvious step is the first one. These clips are edited propaganda: they open with title cards and a logo sting, freeze mid-clip to highlight the targets, and end on a replay and a branded outro. None of that is camera motion through a scene — feed it to a reconstructor and it pollutes everything. So before anything else I had to keep only the stretches that are genuinely FPV flight (here, roughly seconds 10–20 and 25–37 of a 53-second clip) and drop the title cards, the freeze, and the replay.
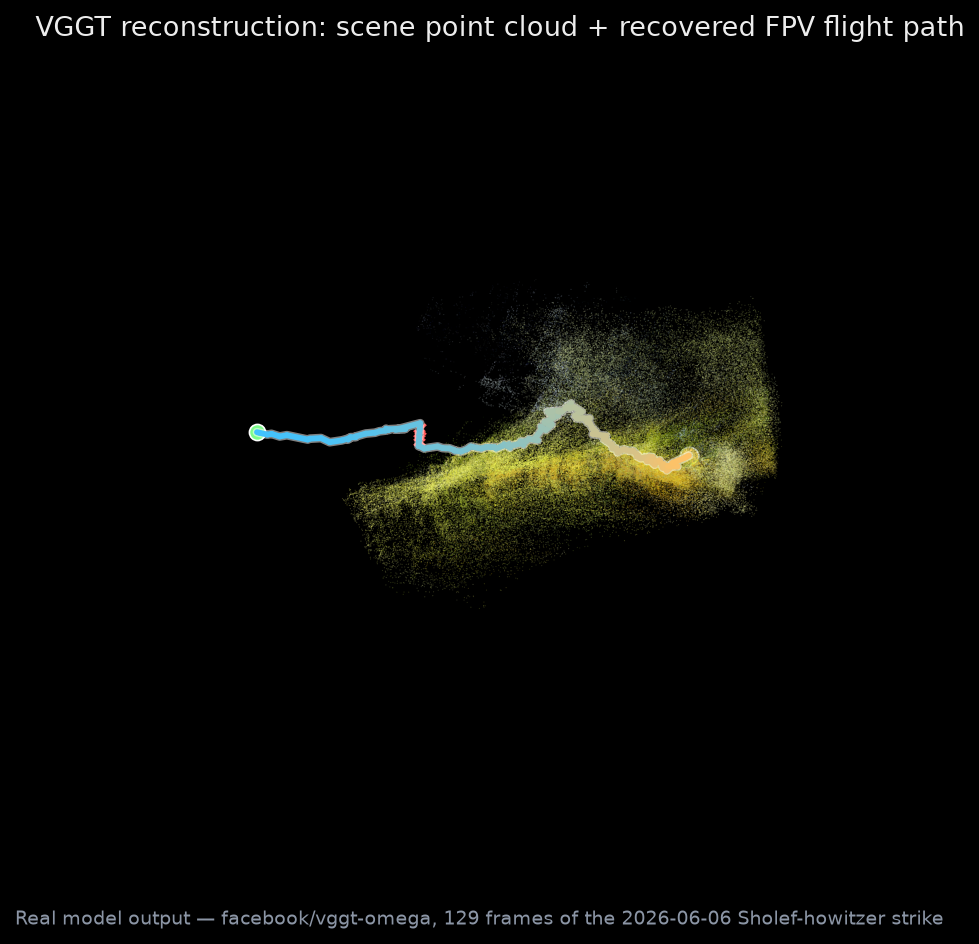
Then the real work is done by VGGT (Visual Geometry Grounded Transformer, Wang et al., CVPR 2025) — a network that takes a set of frames and, in a single forward pass, predicts the camera pose for each frame plus a dense 3-D point cloud of the scene. I sampled the kept footage at 6 frames per second — 129 frames — and ran the real model through the public facebook/vggt-omega Space. The camera centers it recovers, in order, are the drone's flight path.
Here's the extraction. On the left is the actual FPV feed — the drone's own view, sweeping over terrain, past buildings, onto the target. On the right is the VGGT reconstruction: the scene as a point cloud, and the flight path drawing itself in, one recovered pose per frame, as the view orbits so you can see it's genuinely 3-D.
And the reconstruction on its own — the terrain ahead fanning out from the dense depth estimate, with the approach traced from the launch view (green) down the cyan-to-gold line to the terminal pose over the target:
To verify the reconstruction we can re-project that point cloud back through each recovered camera pose and compare it to the frame it came from. The synthetic views line up with the real footage — the target grows as the drone closes in:
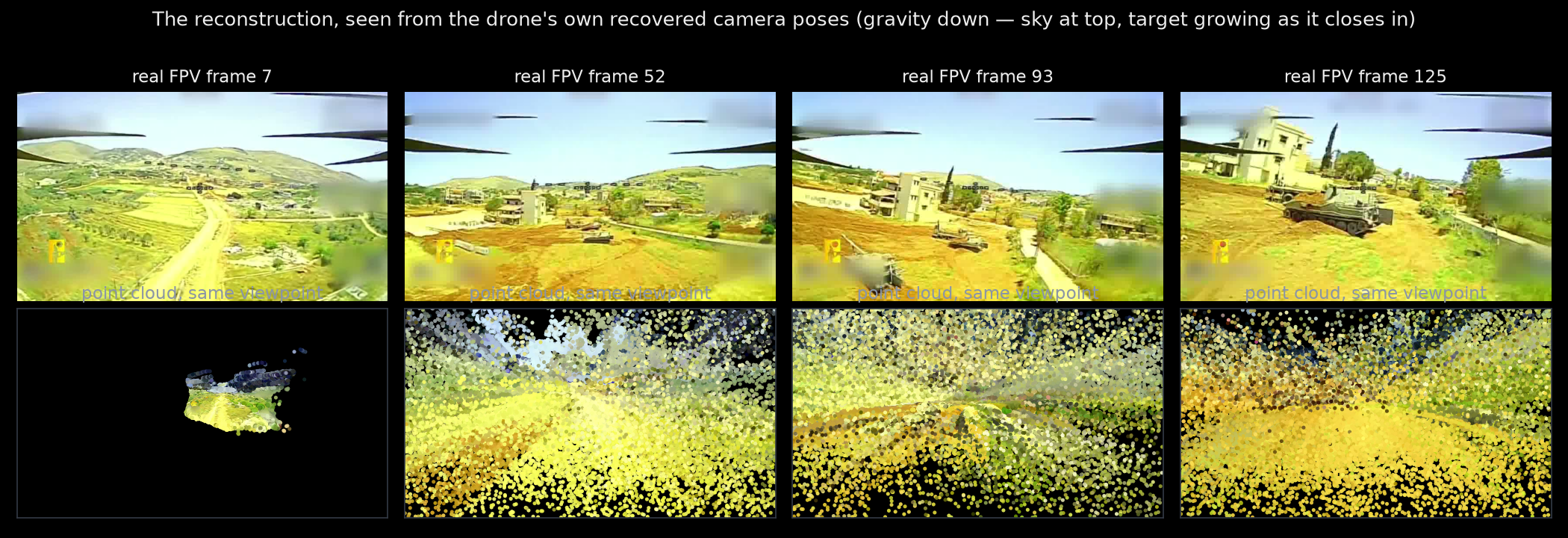
These clips are not survey data. The lenses are heavily distorted, the footage is compressed and motion-blurred, the sky gives the network almost nothing to hold onto, and the recovered geometry is good only up to a global scale and rotation — a few of the 129 poses are even bad enough that I flag them as outliers (the red crosses) and interpolate across them. And yet there's a lot to learn. From a low-quality propaganda clip and a single forward pass you still get a faithful 3-D reconstruction of the approach. Do that across the whole dataset and the anecdotes turn into distributions: approach corridors, dive angles, standoff distances — the geometry of how these attacks actually unfold.
Why I'm opening it up
First, because it's already in the public domain. Hezbollah publishes these clips itself, as propaganda — they're scattered across channels and feeds, surfacing and disappearing. I see real value in pulling them into one comprehensive, labelled, durable collection that doesn't vanish when a channel goes down.
And then there's what you can do with it. There's a lot we can learn from footage that's already in the public domain — the paths these drones fly, the methods, the targets — and a real collection like this gives us a better way to evaluate defense techniques and systems against how the threat actually behaves, rather than against a tidy simulation. It's the same reason I went down the rabbit hole of designing a microphone array to detect FPV drones: the physics and the algorithms only get you so far without representative data to point them at.
So the dataset stays public and stays current. If you're researching the threat, building a defense, or just want to understand what's happening on the border with your own eyes: github.com/itamarwe/fpv-drone-strikes-lebanon-dataset. Use it, learn from it, and if you have footage that belongs in it, send it my way.